


 CC BY
CC BY 22
22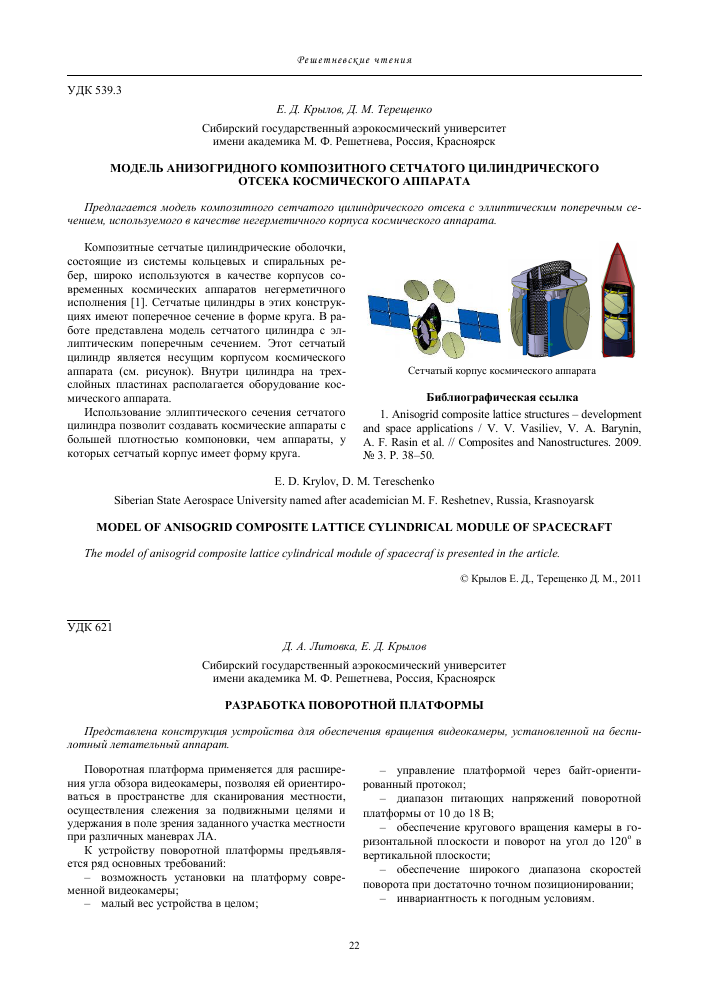
Решетневские чтения
УДК 539.3
Е. Д. Крылов, Д. М. Терещенко
Сибирский государственный аэрокосмический университет имени академика М. Ф. Решетнева, Россия, Красноярск
МОДЕЛЬ АНИЗОГРИДНОГО КОМПОЗИТНОГО СЕТЧАТОГО ЦИЛИНДРИЧЕСКОГО ОТСЕКА КОСМИЧЕСКОГО АППАРАТА
Предлагается модель композитного сетчатого цилиндрического отсека с эллиптическим поперечным сечением, используемого в качестве негерметичного корпуса космического аппарата.
Композитные сетчатые цилиндрические оболочки, состоящие из системы кольцевых и спиральных ребер, широко используются в качестве корпусов со -временных космических аппаратов негерметичного исполнения [1]. Сетчатые цилиндры в этих конструкциях имеют поперечное сечение в форме круга. В работе представлена модель сетчатого цилиндра с эл-липтическим поперечным сечением. Этот сетчатый цилиндр является несущим корпусом космического аппарата (см. рисунок). Внутри цилиндра на трехслойных пластинах располагается оборудование космического аппарата.
Использование эллиптического сечения сетчатого цилиндра позволит создавать космические аппараты с большей плотностью компоновки, чем аппараты, у которых сетчатый корпус имеет форму круга.
E. D. Krylov, D. M. Tereschenko Siberian State Aerospace University named after academician M. F. Reshetnev, Russia, Krasnoyarsk
MODEL OF ANISOGRID COMPOSITE LATTICE CYLINDRICAL MODULE OF SPACECRAFT
The model of anisogrid composite lattice cylindrical module of spacecraf is presented in the article.
© Крылов Е. Д., Терещенко Д. М., 2011
Сетчатый корпус космического аппарата
Библиографическая ссылка
1. Anisogrid composite lattice structures - development and space applications / V. V. Vasiliev, V. A. Barynin, A. F. Rasin et al. // Composites and Nanostructures. 2009. № 3. Р. 38-50.
УДК 621
Д. А. Литовка, Е. Д. Крылов
Сибирский государственный аэрокосмический университет имени академика М. Ф. Решетнева, Россия, Красноярск
РАЗРАБОТКА ПОВОРОТНОЙ ПЛАТФОРМЫ
Представлена конструкция устройства для обеспечения вращения видеокамеры, установленной на беспилотный летательный аппарат.
Поворотная платформа применяется для расширения угла обзора видеокамеры, позволяя ей ориентироваться в пространстве для сканирования местности, осуществления слежения за подвижными целями и удержания в поле зрения заданного участка местности при различных маневрах ЛА.
К устройству поворотной платформы предъявля-ется ряд основных требований:
- возможность установки на платформу современной видеокамеры;
- малый вес устройства в целом;
- управление платформой через байт-ориентированный протокол;
- диапазон питающих напряжений поворотной платформы от 10 до 18 В;
- обеспечение кругового вращения камеры в горизонтальной плоскости и поворот на угол до 120о в вертикальной плоскости;
- обеспечение широкого диапазона скоростей поворота при достаточно точном позиционировании;
- инвариантность к погодным условиям.
Проектирование и производство летательных аппаратов, космические исследования и проекты
Для выполнения основных задач видеокамера имеет:
- широкий диапазон оптического увеличения (фокусное расстояние объектива, изменяющееся в широком диапазоне);
- встроенный стабилизатор изображения;
- массу не более 200 г.
Поворотная платформа имеет две угловых степени свободы. Вращение камеры в горизонтальной плоскости осуществляется за счет открытой зубчатой передачи. В вертикальной плоскости вращение осуществляется электродвигателем с планетарным редуктором, имеющим прямой привод к оси вращения, на которой размещена видеокамера. Для защиты видеокамеры от внешних воздействий применен углепластиковый кожух. Вырез в кожухе для объектива видеокамеры защищен углепластиковой створкой (рис. 1).
О 03 0.4 0.Ö 0.S
Рис. 1. График зависимости момента от времени
Для обеспечения вращения видеокамеры используется два электропривода. Их выбор производился исходя из теоретических расчетов момента, необходимого для поворота оси на требуемый угол за заданное время (зависимость момента от времени приведена на рис. 2). Важным фактором при выборе приводов
являлись их технические характеристики, такие как масса и габариты [1-3].
Рис. 2. Поворотная платформа
Система управления поворотной платформы включает в себя концевые датчики холла, обеспечивающие установку начального положения осей при инициализации устройства. Точное угловое позиционирование осей во время работы платформы обеспечивается посредством интегрирования сигналов от энкодеров, встроенных в электроприводы.
После изготовления, прохождения ряда наземных испытаний (проверки функционирования, отработки на воздействие климатических факторов и ударных нагрузок) поворотная платформа допускается к установке на беспилотный летательный аппарат DELTA.
Библиографические ссылки
1. Mechanical Engineering Handbook / Ed. Frank Kreith. Boca Raton: CRC Press LLC, 1999.
2. Анурьев В. И. Справочник конструктора-машиностроителя : в 3 т. / под ред. И. Н. Жестковой. 8-е изд., перераб. и доп. М. : Машиностроение, 2001.
3. Орлов П. И. Основы конструирования : справ.-метод. пособие : в 2 кн. 3-е изд., исправл. М. : Машиностроение, 1988.
D. A. Litovka, E. D. Krylov Siberian State Aerospace University named after academician M. F. Reshetnev, Russia, Krasnoyarsk
DEVELOPMENT OF STEERABLE PLATFORM
The article presents design of a set up for steerable camera set on an unmanned flying vehicle.
© Литовка Д. А., Крылов Е. Д., 2011
УДК 539.3
А. В. Лопатин, Т. С. Колесникова
Сибирский государственный аэрокосмический университет имени академика М. Ф. Решетнева, Россия, Красноярск
УСТОЙЧИВОСТЬ ОРТОТРОПНОЙ ПЛАСТИНЫ ПРИ НЕРАВНОМЕРНОМ
СЖАТИИ И ИЗГИБЕ
Решена задача устойчивости ортотропной пластины, нагруженной на краях линейно изменяющимися усилиями. Для решения задачи устойчивости используются метод Канторовича и обобщенный метод Галеркина.
Задача устойчивости прямоугольной пластины, случая, когда к шарнирно закрепленным краям при-
которая имеет два противоположных шарнирно за- ложена равномерная сжимающая нагрузка. Первое
крепленных края, один жестко закрепленный край и решение этой задачи для изотропной пластины было
один свободный край, наиболее подробно изучена для выполнено Timoshenko [1]. Полезные результаты ана -
