


 CC BY
CC BY 28
28
УДК 531.01+531.552
М.В. Шамолин1
СЛУЧАИ ИНТЕГРИРУЕМОСТИ, СООТВЕТСТВУЮЩИЕ ДВИЖЕНИЮ МАЯТНИКА НА ПЛОСКОСТИ2
В данной работе систематизируются результаты по исследованию уравнений плоскопараллельного движения закрепленного твердого тела-маятника, находящегося в некотором неконсервативном поле сил. Параллельно рассматривается задача о плоскопараллельном движении свободного твердого тела, также находящегося в подобном поле сил. При этом на данное свободное тело также действует неконсервативная следящая сила, заставляющая во все время движения величину скорости некоторой характерной точки твердого тела оставаться постоянной во времени, что означает наличие в системе неинтегрируемой сервосвязи. Полученные результаты еистематизируются и подаются в инвариантном виде. Указаны нетривиальные механические и топологические аналогии.
Ключевые слова: твердое тело, сопротивляющаяся среда, динамическая система, фазовый портрет, случай интегрируемости.
1. Модельные предположения
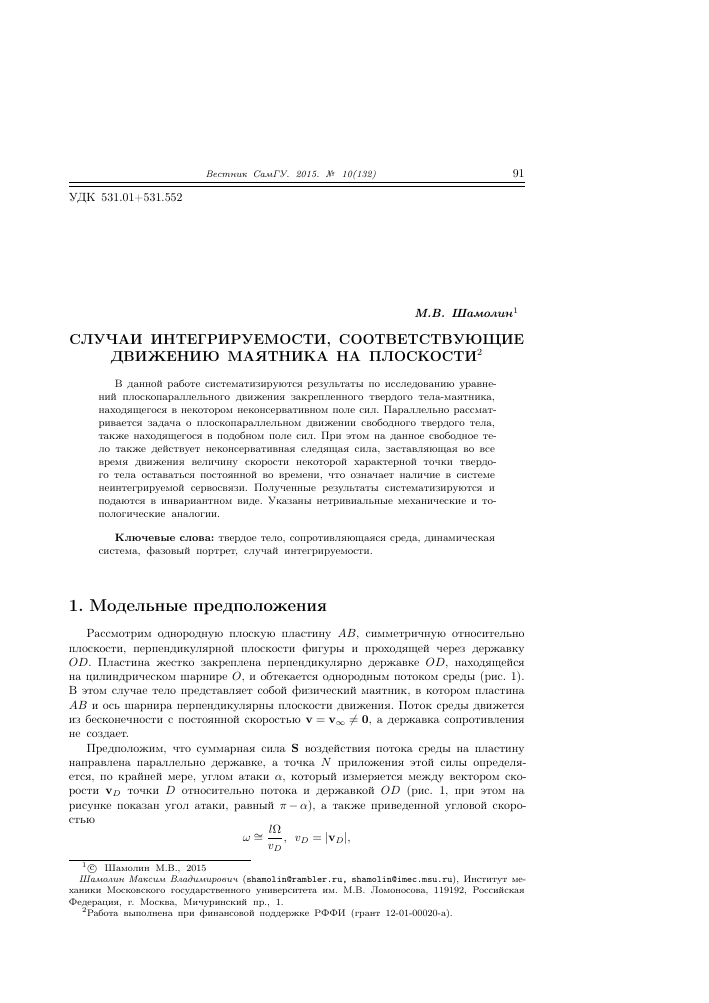
Рассмотрим однородную плоскую пластину АВ, симметричную относительно плоскости, перпендикулярной плоскости фигуры и проходящей через державку ОБ. Пластина жестко закреплена перпендикулярно державке ОБ, находящейся на цилиндрическом шарнире О, и обтекается однородным потоком среды (рис. 1). В этом случае тело представляет собой физический маятник, в котором пластина АВ и ось шарнира перпендикулярны плоскости движения. Поток среды движется из бесконечности с постоянной скоростью V = = 0, а державка сопротивления не создает.
Предположим, что суммарная сила 8 воздействия потока среды на пластину направлена параллельно державке, а точка N приложения этой силы определяется, по крайней мере, углом атаки а, который измеряется между вектором скорости VD точки Б относительно потока и державкой ОБ (рис. 1, при этом на рисунке показан угол атаки, равный п — а), а также приведенной угловой скоростью
II
Шамолин М.В., 2015
Шамолин Максим Владимирович (shamolin@rambler.ru, shamolin@imec.msu.ru), Институт механики Московского государственного университета им. М.В. Ломоносова, 119192, Российская Федерация, г. Москва, Мичуринский пр., 1.
2Работа выполнена при финансовой поддержке РФФИ (грант 12-01-00020-а).
Рис. 1. Закрепленный маятник на цилиндрическом шарнире в потоке набегающей среды
где l — длина державки, Q — алгебраическое значение проекции угловой скорости маятника на ось шарнира.
Подобные условия возникают при использовании модели струйного обтекания плоских тел [1-3].
Таким образом, примем, что сила S направлена по нормали к пластине в сторону, противоположную направлению скорости Уд, и проходит через некоторую точку N пластины, смещенную от точки D вверх по потоку (см. также [3; 4]). Вектор
e= (1.1)
определяет ориентацию державки. Тогда
S = -s(a)vD e, (1.2)
где
s(a) = si(a)signcos a, (1.3)
где коэффициент сопротивления si ^ 0 зависит лишь от угла атаки a. В силу свойств симметрии пластины относительно точки D функция s(a) является четной.
Пусть Dxix2 = Dxy — система координат, жестко связанная с телом, при этом ось Dx = Dxi имеет направляющий вектор e (см. (1.1)), а ось Dx2 = Dy сонаправлена с вектором DA (рис. 1). На этом же рисунке показан и в = £ — угол отклонения маятника.
Пространством положений такого физического маятника является окружность (одномерная сфера)
S{ е R1 : £ mod 2п}, (1.4)
а фазовым пространством — касательное расслоение окружности,
T-*S1{(£; £) е R2 : £ mod 2п} (1.5)
— двумерный цилиндр.
Свяжем с величиной Q кососимметрическую матрицу
"=(" о") , " е so(2). (1.6)
Расстояние от центра пластины Б до центра давления (точки N, рис. 1) будет иметь вид
|гм I = ТМ = В^а,1-^ , (1.7)
где
Гм = [0,Х2М} = {0,Ум}
в системе Бх\хь = Бху.
Сразу же заметим, что используемая модель воздействия потока среды на закрепленный маятник аналогична построенной модели для свободного тела и в дальнейшем учитывает влияние вращательной производной момента силы воздействия среды по угловой скорости маятника (см. также [5-7]). Анализ задачи о физическом маятнике в потоке позволит обнаружить качественные аналогии в динамике частично закрепленных и свободных тел.
2. Группа динамических уравнений на алгебре Ли бо(2)
Если I — центральный момент инерции тела-маятника, то общее уравнение его движения примет следующий вид:
117 = ВN(a,'Bj з(а)у2в, (2.1)
(
„2 п h (2-2)
поскольку момент силы воздействия среды равен определителю следующей вспомогательной матрицы:
0 Х2М
—з(а)у2в 0 где
{—Ь, 0}
есть разложение силы 8 воздействия среды в системе координат Бх\х2.
Поскольку размерность алгебры Ли эо(2) равна 1, единственное уравнение (2.1) и составляет группу динамических уравнений на эо(2), а, попросту говоря, уравнение движения.
Видно, что в правую часть уравнения (2.1) прежде всего входит угол атаки, поэтому данное уравнение не является замкнутым. Для того чтобы получить полную систему уравнений движения маятника, необходимо к динамическому уравнению на алгебре Ли эо(2) присоединить несколько групп кинематических уравнений.
3. Первая группа кинематических уравнений
Для получения полной системы уравнений движения нам потребуется группа кинематических уравнений, связывающих скорости точки D (формального центра пластины AB) и набегающего потока:
vD = vD ■ iv(а) = + (-v^)iv(-£), (3-1)
где
iv(а) = ( COS °Л. (3-2)
4 ' у sin а J v '
Равенство (3.1) выражает теорему сложения скоростей в проекциях на связанную систему координат Dxix^.
Действительно, в левой части равенства (3.1) стоит скорость точки D маятника относительно потока в проекциях на связанную с маятником систему координат Dxix2. При этом вектор iv(а) — единичный вектор вдоль оси вектора vd. Вектор iv(а) является образом единичного вектора вдоль оси Dx 1, повернутого около вертикали (оси Dx¡) на угол а, и имеет разложение (3.2).
В правой части равенства (3.1) стоит сумма скоростей точки D при повороте маятника (первое слагаемое) и движения потока (второе слагаемое). При этом в первом слагаемом имеются координаты вектора OD = {l, 0} в системе координат Dxi x2.
На втором слагаемом правой части равенства (3.1) остановимся подробнее. В нем имеются координаты вектора (—vTO) = { v^q, 0} в неподвижном пространстве. Чтобы его записать в проекциях на связанную систему координат Dxix2, необходимо произвести (обратный) поворот маятника на угол (—£), что алгебраически эквивалентно умножению величины (— vTO) на вектор iv (—£).
Таким образом, первая группа кинематических уравнений (3.1) в нашем случае примет следующий вид:
vD cos а = —vж cos (3 3)
vD sin а = lQ + vж sin
4. Вторая группа кинематических уравнений
Нам также потребуется группа кинематических уравнений, связывающих тензор угловой скорости П и координаты фазового пространства (1.5) исследуемого маятника — касательного расслоения Т^1^; £}.
Проведем рассуждения в стиле, допускающем любую размерность. Искомые уравнения получаются из следующих двух групп соотношений. Поскольку движение тела формально происходит в евклидовом пространстве Еп,п = 2, сначала выражается набор, состоящий из фазовой переменной П, через новую переменную г1 (из набора г):
П = г1. (4.1)
Затем вместо переменной 2 подставляется следующая зависимость:
г1 = е (4.2)
Таким образом, две группы уравнений (4.1) и (4.2) дают вторую группу кинематических уравнений:
п = е (4.3)
Видно, что три группы соотношений (2.1), (3.3), (4.3) образуют замкнутую систему уравнений. В эти три группы уравнений входят две следующие функции:
тИ = ПМ^а,—^ , ¡(а). (4.4)
При этом функция в считается зависимой лишь от а, а функция тN = ПМ может зависеть, наряду с углом а, вообще говоря, и от приведенной угловой скорости ш = .
5. Задача о движении свободного тела при наличии следящей силы
Параллельно рассматриваемой задаче о движении закрепленного тела рассмотрим плоскопараллельное движение свободного симметричного твердого тела с передним плоским торцом (одномерной пластиной АВ) в поле силы сопротивления в условиях квазистационарности [5; 8; 9] с той же моделью воздействия среды (рис. 2).
Рис. 2. Плоскопараллельное движение свободного симметричного твердого тела в сопротивляющейся среде
Если (v, а) — полярные координаты вектора скорости некоторой характерной точки D твердого тела (D — центр пластины AB), О — значение его угловой скорости, I,m — инерционно-массовые характеристики, то динамическая часть уравнений движения тела, при котором касательные силы воздействия среды на пластину отсутствуют, примет вид:
2 Fx
v cos а — аv sin а — Оv sin а + аО = —,
m
vsin а + аv cos а + Ov cos а — аО = 0, (5.1)
• ( О \ 2 IO = yN (а, — j э(а^ ,
где
Fx = —S, S = в(а^2, а = CD, (5.2)
при этом
0,yN (а, О)) (5.3)
есть координаты точки N приложения силы S в системе координат Dx\x2 = Dxy, связанной с телом (рис. 2).
Первые два уравнения системы (5.1) описывают движение центра масс на двумерной евклидовой плоскости E2 в проекциях на систему координат Dx\x2. При этом Dxi = Dx — срединный перпендикуляр к пластине, проходящий через центр масс C симметричного тела, а Dx2 = Dy — ось, выбранная вдоль пластины. Третье же уравнение системы (5.1) получено из теоремы об изменении кинетического момента тела в проекции на ось, перпендикулярную рисунку.
Таким образом, фазовым пространством системы динамических уравнений (5.1) третьего порядка является прямое произведение
R1 х S1 х so(2) (5.4)
двумерного цилиндра на алгебру Ли эо(2). При этом, поскольку сила воздействия среды не зависит от положения тела на плоскости, система динамических уравнений (5.1) отделяется от системы кинематических уравнений и может быть рассмотрена самостоятельно (см. также [6; 10]).
5.1. Неинтегрируемая связь
Если рассматривается более общая .задача о движении тела при наличии некоторой следящей силы T, проходящей через центр масс и обеспечивающей во все время движения выполнение равенства (см. также [11])
v = const, (5.5)
то в системе (5.1) вместо Fx будет стоять величина
T — s(a)v2. (5.6)
В результате соответствующего выбора величины T следящей силы можно формально добиться во все время движения выполнения равенства (5.5) [12]. Действительно, формально выражая величину T в силу системы (5.1), получим при cos а = 0:
T = Tv (а, П) = matt2 + s(a)v2
ma ( П\ sin а
1--y~^ _ -
I \ v J cos а
(5.7)
На данную процедуру можно посмотреть с двух позиций. Во-первых, произошло преобразование системы при помощи наличия в системе следящей силы (управления), обеспечивающей рассмотрение интересующего нас класса движений (5.5). Во-вторых, на это все можно посмотреть как на процедуру, позволяющую понизить порядок системы. Действительно, система (5.1) в результате действий порождает независимую систему второго порядка следующего вида:
ctv cos а + ttv cos а — att = 0, , ,
/П = yN (а, V) s(а)v'2, (5.8)
в которой к постоянным параметрам, указанным выше, добавляется параметр v. Как видно из (5.8), на многообразии
O = | (а, П) € R2 : а = 2 + пк, к € Z} (5.9)
п 2
нельзя однозначно разрешить систему относительно а. Формально, таким образом, на многообразии (5.9) происходит нарушение теоремы единственности.
Из этого следует, что система (5.8) вне и только вне многообразия (5.9) эквивалентна системе
«= -П + Г-^Ш^, (5.10)
П = 1 ум (а, V) з(а)у2.
Нарушение теоремы единственности для системы (5.8) на многообразии (5.9) происходит в следующем смысле: почти через любую точку из многообразия (5.9) проходит неособая фазовая траектория системы (5.8), пересекая многообразие (5.9) под прямым углом, а также существует фазовая траектория, полностью совпадающая во все моменты времени с указанной точкой. Но физически это различные траектории, так как им отвечают разные значения следящей силы. Покажем это.
Как показано выше, для поддержания связи вида (5.5) необходимо выбрать значение T при cos а = 0 в виде (5.7). Пусть
lim ^ ^ ^ 5(а) = b(й) . (5.11)
а^п/2 cos а \v J
Заметим, что \L\ < тогда и только тогда, когда
< (5.12)
lim
а^п/2
да [yN (а'") й(а))
да \ \ V
При а = п/2 нужная величина следящей силы найдется из равенства
'п „\ „о таЬт2
где значение П произвольно.
С другой стороны, поддерживая с помощью следящей силы вращение вокруг некоторой точки Ш евклидовой плоскости Е2, необходимо выбрать следящую силу в виде
T = T. (|,п) = той* — тр., (5.13)
(П ■ ") = Ь (5.14)
т = т„п.
.2 ) До
где Д0 — расстояние СШ.
Равенства (5.13) и (5.14) определяют, вообще говоря, различные значения следящей силы т для почти всех точек многообразия (5.9), что и доказывает сделанное замечание.
5.2. Постоянная скорость центра масс
Если рассматривается более общая .задача о движении тела при наличии некоторой следящей силы T, проходящей через центр масс и обеспечивающей во все время движения выполнение равенства (см. также [13; 14])
Vc = const, (5.15)
где Vc — скорость центра масс, то в системе (5.1) вместо Fx должна стоять величина, тождественно равная нулю, поскольку на тело будет действовать неконсервативная пара сил:
T - s(a)v2 = 0. (5.16)
Очевидно, что для этого нужно выбрать величину следящей силы T в виде T = Tv(а, П) = s(a)v2, T =-S. (5.17)
Случай (5.17) выбора величины T следящей силы является частным случаем возможности отделения независимой подсистемы второго порядка после некоторого преобразования системы третьего порядка (5.1).
Действительно, пусть выполнено следующее условие на величину T:
T = Tv(а, П) = -л ^а, ^ v2 + т2 (^а, ^ Ov + т3 ^а, ^ П2 = T^а, ^ v2. (5.18)
Систему (5.1) можно переписать в виде
v2 / П) 1 Ti (а, V) v2 - з(а.у
V + ой* cos а — о sin а
v" ( й\ ( )
~jyN I а, — \ в(а)
■ cos а,
m
av + Qv — a cos а
„2
V ( ^ ( )
—ум s(a)
I
— aQ2 sin а
s(a)v2 — T1 (a, f ) v2
sin a, (5.19)
2
Вводя далее новые безразмерные фазовую переменную и дифференцирование по формулам
Q = nivw, < ■ >= niv <'>, ni > 0, ni = const, систему (5.19) можно привести к следующему виду:
v' = v^(a, ш),
а = —ш + aniш sin а +
Ti (a,niu)-s(a)
■ПУм (a,niш) s(a)
cos a—
ш' = In1 Ум (a, тш) s(a) — ш -ПУм (а, тш) s(a)
I 3 T1(a,n1u) — s(a)
+an^3 cos a — ш 14 ' w—— cos a,
i mni '
Ф(а, ш) = —aniш2 cos a +
-—Ум (а,щш) s(a) Ini
sin a+
sin a+
(5.20)
(5.21)
(5.22)
Ti (а, п-\ш) — s(a)
+—i v , i /-cos
mni
Видно, что в системе третьего порядка (5.21), (5.22) может быть выделена независимая подсистема второго порядка (5.22), которая может быть самостоятельно рассмотрена на своем двумерном фазовом цилиндре.
В частности, при выполнении условия (5.17) только что рассмотренный прием выделения независимой подсистемы второго порядка также возможен.
6. Случай отсутствия зависимости момента неконсервативных сил от угловой скорости
Выберем функцию гм в следующем виде (пластина АВ задается уравнением хш = 0):
гм = ( х!М ) = ВДм, (6-1)
где
1м = ( (6.2)
(см. (3.2)).
В нашем случае
0
1м =
(?) •
1
Таким образом, выполнено равенство
Х2м = R(a),
(6.3)
(6.4)
убеждающее нас о том, что в рассматриваемой системе отсутствует зависимость момента сил от угловой скорости (имеется лишь зависимость от угла а).
m
sin а
mn i
Итак, для построения силового поля используется пара функций R(a),s(a), информация о которых носит качественный характер. Подобно выбору аналитических функций типа Чаплыгина [11; 12], динамические функции s и R примем в следующем виде:
R(a) = A sin а, s(a) = B cos a, A,B> 0. (6.5)
6.1. Приведенные системы
Теорема 6.1. Совместные уравнения (2.1), (3.3), (4.3) при выполнении условий (6.1), (6.5) редуцируются к динамической системе на касательном расслоении (1.5) одномерной сферы (1.4).
Действительно, если ввести безразмерные параметр и дифференцирование:
2 AB . . .
О* = lno, n0 = —< • >= Поvоо < >, (6.6)
то полученное уравнение будет иметь следующий вид:
£'' + b*£' cos £ + sin £ cos £ = 0. (6.7)
Фазовый портрет уравнения (6.7) (а ^ £ — п, П ^ £') изображен на рис. 3, при этом положения равновесия на оси абцисс расположены через п/2.
Рис. 3. Фазовый портрет закрепленного маятника на цилиндрическом шарнире в потоке набегающей среды
После же перехода от переменных ^ (о переменных ^ см. (4.2)) к переменным т
1
w± = — -
no Voo
-zi — Ь* sin £
уравнение (6.7) будет эквивалентно системе
£' = —wi — Ь* sin £, w[ = sin £ cos £
на касательном расслоении
(6.8)
(6.9) (6.10)
T*S^Wi;£) G R2 : £ mod 2п} одномерной сферы Si{£ G R1 : £ mod 2п}.
Фазовый портрет системы (6.9) (а ^ £ — п, и ^ w1) изображен на рис. 4.
Рис. 4. Динамическая система с переменной диссипацией
6.2. Общие замечания об интегрируемости системы
Для полного интегрирования системы (6.9) второго порядка необходимо знать, вообще говоря, один независимый первый интеграл.
6.2.1. Система при отсутствии силового поля
Рассмотрим систему (6.9) на касательном расслоении T^S1 [wi;£} одномерной сферы S1[£}. При этом получим из нее систему консервативную. Более того, будем считать, что функция (1.7) тождественно равна нулю (в частности, b* = 0, а также коэффициент sin £ cos £ во втором уравнении системы (6.9) отсутствует). Рассматриваемая система примет вид
£' = -wi, (6.11)
wi =0. (6.12)
Система (6.11), (6.12) описывает движение твердого тела при отсутствии внешнего поля сил.
Предложение 6.1. Система (6.11), (6.12) обладает одним аналитическим первым интегралом следующего вида:
$i(wi; £) = wf = Ci = const. (6.13)
Данный первый интеграл (6.13) констатирует тот факт, что поскольку внешнего поля сил нет, то сохраняется (вообще говоря, ненулевая) компонента угловой скорости ("двумерного") твердого тела, а именно:
Q = Q0 = const. (6.14)
В частности, наличие первого интеграла (6.13) объясняется равенством
wf = ^V^2 = Ci = const. (6.15)
n0 Voo
6.2.2. Система при наличии консервативного силового поля
Теперь рассмотрим систему (6.9) при условии b* = 0. При этом получим систему консервативную. А именно наличие силового поля характеризует коэффициент sin £ cos £ во втором уравнении системы (6.9) (в отличие от системы (6.11), (6.12)). Рассматриваемая система примет вид
а = —wi, (6.16)
w'i = sin £ cos £. (6-17)
Итак, система (6-16), (6-17) описывает движение твердого тела в консервативном внешнем поле сил.
Предложение 6.2. Система (6.16), (6.17) обладает одним аналитическим первым интегралом следующего вида:
$i(wi; £) = w\ + sin2 £ = C i = const, (6.18)
Первый интеграл (6-18) является интегралом полной энергии.
6.3. Трансцендентный первый интеграл
Перейдем теперь к интегрированию искомой системы второго порядка (6-9) (без всяких упрощений — при наличии всех коэффициентов)-
Сопоставим системе (6-9) неавтономное уравнение первого порядка
dw i sin £ cos £
~1Г =-T—c. (6-19)
d£ —wi — b* sin £
Используя замену т = sin £, перепишем уравнение (6-19) в алгебраическом виде
dw i т
dT =-— (6-20)
dT —w i — Ъ*т
Далее, вводя однородную переменную по формуле wi = ит, приводим уравнение (6-20) к следующей квадратуре:
(—Ъ* — u)du = dr (6 21)
1 + b*u + u2 = т . (-)
Интегрирование квадратуры (6-21) приводит к рассмотрению трех случаев-Несложный подсчет приводит к следующим первым интегралам-I. b2 — 4 < 0.
ln(1 + b,u + u2) + 2Ъ* arctg 2u + Ъ* + lnт2 = const. (6-22)
V4—Щ v ;
2u + b* + Vbl — 4
2u + b* — ^ b¡ — 4
+ ln т2 = const. (6-23)
II. bl — 4 > 0. ln 11 + b*u + u21--. * ln
III. b2 — 4 = 0.
ln \u — 1| +--Ц- + 1п \т\ = const. (6-24)
u — 1
Другими словами, в переменных (£, w ) найденные первые интегралы имеют вид:
I. b2 — 4 < 0.
2 2 2b 2w + b sin £
Ism £ + b.t_wi sin £ + wI exp < —, arctg—. - >= const. (6-25)
л/А—ЪЪ* sin £ J v ;
II. b2* — 4 > 0.
[sin2 £ + b*wi sin £ + w2]
2w i + b* sin £ + b2 — 4 sin £
2wi + b* sin £ — \Jb2 — 4 sin £
const. (6-26)
III. bl — 4 = 0.
(w1 — sin £)exp<——- 1 = const. (6.27)
— sin 4 j
Итак, в рассматриваемом случае система динамических уравнений (6.9) имеет первый интеграл, выражающийся соотношениями (6.25)—(6.27) (или (6.22)—(6.24)), являющийся трансцендентной функцией фазовых переменных (в смысле комплексного анализа) и выражающийся через конечную комбинацию элементарных функций.
Теорема 6.2. Три группы соотношений (2.1), (3.3), (4.3) при условиях (6.1), (6.5) обладают первым интегралом (полным набором), являющимся трансцендентной функцией с точки зрения комплексного анализа, выражающимся через конечную комбинацию элементарных функций.
6.4. Топологические аналогии
Предъявим далее две группы аналогий, связанных с системой (5.1), описывающей движение свободного твердого тела при наличии следящей силы.
Первая группа аналогий касается случая наличия в системе неинтегрируемой связи (5.5). В данном случае динамическая часть уравнений движения при некоторых условиях приводится к системе (5.10).
При выполнении условий (6.1), (6.5) система (5.10) примет вид
а' = — ш + b sin а, (6.28)
ш = sin а cos а, '
если ввести безразмерные параметр, переменную и дифференцирование по аналогии с (6.6):
AB
b = ano, П = —Q = поуш, < • >= n^v <'> . (6.29)
Теорема 6.3. Система (6.28) (для свободного тела) эквивалентна системе (6.9) (для закрепленного маятника).
Действительно, достаточно положить
4 = а, wi = ш, bl = —b. (6.30)
Следствие 6.1.
1. Фазовый портрет системы (6.28) изображен на рис. 4.
2. Угол атаки а для свободного тела (рис. 2) эквивалентен углу отклонения 4 закрепленного маятника (рис. 1).
3. Расстояние a = CD для свободного тела соответствует длине державки l = OD закрепленного маятника.
4. Первый интеграл системы (6.28) может быть автоматически получен через равенства (6.22)-(6.24) (или (6.25)-(6.27)) после подстановок (6.30) (см. также [15]):
I. b2 — 4 < 0.
г 2 i 2 í 2b 2ш — b sin а 1
[sin а — Ьш sin а + ш21 exp <-- arctg - > = const. (6.31)
4 — b2 4 — b2 sin а
II. b2 — 4 > 0.
b/Vb^—i
[sin2 а — Ьш sin а + ш2] III. b2 4 = 0.
2ш — b sin а + %/b2 — 4 sil
2ш — b sin а — %/b2 — 4 sil
const. (6.32)
sin а
(ш — sin а)ех^<-:-> = const. (6.33)
[ ш — sin а J
Вторая группа аналогий касается случая движения с постоянной скоростью центра масс тела, т. е. когда выполнено свойство (5.15). В данном случае динамическая часть уравнений движения при некоторых условиях приводится к системе (5.22).
Тогда, в силу условий (5.15), (6.1), (6.5), (6.29) преобразованная динамическая часть уравнений движения (система (5.22)) примет вид аналитической системы
а' = —ш + b sin а cos2 а + Ьш2 sin а, ш' = sin а cos а — Ьш sin2 а cos а + Ьш3 cos а
2________ .з__________(6.34)
при этом выбирая постоянную п\ следующим образом:
п1 = п0. (6.35)
Если вопрос о первом интеграле системы (6.28) решается с помощью следствия 6.1, то аналогичный вопрос для системы (6.34) решает следующая теорема 6.4.
Для этого введем следующие обозначения и новые переменные (ср. с [15]):
C1 = 2 — b, C2 = Ь> 0, C3 = —2 — Ь < 0, ui = ш — sin а, vi = ш + sin а, ui = viti, v2 = 1/qi
2 _ ^ (6.36)
тогда вопрос о явном виде искомого первого интеграла сводится к решению линейного неоднородного уравнения:
^ = а1(г1)д1 + а,2(^), (6.37)
аъ1
где
, ч 2(С3 г1 + С2) ч 4С2^
^^ = ЬэУ- С , ^^ = • (6.38)
Общее решение уравнения (6.37) имеет следующий вид: I. Ь< 2.
qi(ti) = k(ti)(—C3ti + Ci)exp j — ^2—yiarct^ ''j + const. (6.39)
II. b > 2.
C2NC1 C3
+ const. (6.40)
qi(ti) = k(ti)(—C3t2 + Ci) III. b = 2.
\J—Ci + %/—C3ti
\J—Ci — \f—C3ti
t
при этом
qi(ti) = k(ti)ti exp | t^j + const, (6.41)
I. b< 2.
b (2b Щ\) = - 8ехР \
vT-b2
2b
.VT—b2
sin 2C - 2 cos 2Z
+ const,
(6.42)
tgZ =
/2 - b V 2Tb^
II. b > 2.
k(Í!) = ±|C l^
,2_ 4
T
b + 2Vbt2—4
|Z |6^v/S2=4+2 + const,
(6.43)
III. b = 2.
Iii—су
V b + 2 Vi + СУ
{-¿}
k(Í! ) = -2 ^expj -1
(6.44)
Таким образом, равенства (6.39)—(6.44) позволяют получить искомый первый интеграл системы (6.34), используя обозначения и замены (6.36). Теорема 6.4. Первый интеграл системы (6.34) является трансцендентной функцией своих фазовых переменных и выражается через конечную комбинацию элементарных функций.
Ввиду громоздкости вида полученного первого интеграла приведем его лишь в случае III:
ехР
( sin а + ш Л \ sin а - ш )
+ ш 1 i - 4ш sin а + 4ш2
sin а - ш) (ш - sin а)2
C = const.
(6.45)
Теорема 6.5. Первый интеграл системы (6.28) постоянен на фазовых траекториях системы (6.34).
Доказательство проведем для случая Ь = 2. Действительно, перепишем первый интеграл (6.45) системы (6.34) в следующем виде:
ехР
n0v sin а + П 1 n^v2 - 2bn0víl sin а + b2n2
( n0v sin а + П 1 \ n0v sin а - П J
(П - n0v sin а)2
const.
(6.46)
Видно, что числитель второго множителя пропорционален квадрату скорости центра масс тела Ve с постоянным коэффициентом n2. Но, в силу (5.15), данная величина постоянна на траекториях системы (6.34). Значит на них постоянна и функция
(n0v sin а + Q ] ,,, .
exp! —-L -e- = Const. (6.47)
[no v sin а — ÍÍ J -------
V 2
VC
n0v sin a — QJ (Q — n0v sin a)2
Возьмем далее степень ( — 1/2) от левой части равенства (6.47) и заключаем, что следующая функция также постоянна на фазовых траекториях системы (6.34):
( О + n0 v sin a
( 0 + no v sin а 1 .
exp < ——-:-- (Í — n0v sin a) = const.
[ 2(0 — n0v sin a) J
А вот теперь, разделив равенство (6.48) на л/ё, получим функцию
ехР
( nov sin а 1 \ П - n0 v sin а J
(П - n0v sin а) = const,
(6.48)
(6.49)
постоянную на фазовых траекториях системы (6.34). Но первый интеграл (6.49) полностью аналогичен первому интегралу (6.33), что и требовалось.
t
i
Итак, мы имеем следующие топологичекие и механические аналогии в том смысле, в котором они объяснены выше.
1. Движение закрепленного на цилиндрическом шарнире физического маятника в потоке набегающей среды (неконсервативное поле сил).
2. Плоскопараллельное движение свободного твердого тела в неконсервативном поле сил со следящей силой (при наличии неинтегрируемой связи).
3. Плоскопараллельное сложное движение твердого тела, вращающегося вокруг центра масс, движущегося прямолинейно и равномерно и находящегося в неконсервативном поле сил.
О более общих топологических аналогиях см. также [15].
7. Случай зависимости момента неконсервативных сил от угловой скорости
7.1. Введение зависимости от угловой скорости
Данная глава посвящена динамике двумерного твердого тела на плоскости. Но, поскольку данный раздел посвящен исследованию случая движения при наличии зависимости момента действующих сил от угловой скорости, введем такую зависимость с более общих позиций. К тому же данная точка зрения поможет нам вводить эту зависимость и для трехмерных, и для многомерных тел.
Пусть х = (х1м ,Х2ы) — координаты точки N приложения неконсервативной силы (воздействия среды) на одномерную пластину, Q = (Ql, Q2) — компоненты, не зависящие от угловой скорости. Будем вводить зависимость функций (х^, х2м) = = (х^,ум) от угловой скорости лишь линейным образом, поскольку само данное введение априори не очевидно.
Итак, примем следующую зависимость:
х = Q + Е, (7.1)
где Е = (Е1,Е2) — вектор-функция, содержащая угловую скорость. При этом зависимость функции Е от угловой скорости гироскопическая:
е=(Е;)=-и2 -2)(Н;> (72)
Здесь (Н1, Н2) — некоторые положительные параметры.
Теперь применительно к нашей задаче, поскольку х^ = хм = 0, то
х2М = Ум = Q2 - Л-1 —. (7.3)
Таким образом, функция гм выбирается в следующем виде (пластина АВ задается уравнением х1м = 0):
гм =( 0 ) = Е(а)1м - —2Н, (7.4)
\ х2М ) Ур
где
N=^-Н=(НО■ 2^2 -2)
(см. (1.6), (3.2)).
= и П), Н = Н1 , 2= 0 -2 ) (7.5)
В нашем случае
iN = ( J ) • (7.6)
Таким образом, выполнено равенство
x0N = R(a) — hi—, (7.7)
vd
убеждающее нас о том, что в рассматриваемой системе присутствует также еще и дополнительный демпфирующий (а в некоторых областях фазового пространства и разгоняющий) момент неконсервативной силы (т. е. присутствует зависимость момента от угловой скорости).
Итак, для построения силового поля также используется пара функций R(a), s(a), информация о которых носит качественный характер. Подобно выбору аналитических функций типа Чаплыгина [1; 2], динамические функции s и R примем в следующем виде:
R(a) = A sin a, s(a) = B cos a, A, B > 0. (7.8)
7.2. Приведенные системы
Теорема 7.1. Совместные уравнения (2.1), (3.3), (4.3) при выполнении условий
(7.4), (7.8) редуцируются к динамической системе на касательном расслоении
(1.5) одномерной сферы (1.4).
Действительно, если ввести безразмерные параметры и дифференцирование:
2 AB hi B . . .
b* = lno, n0 = ——, Hi* = ——, < • >= uqv^ < >, (7.9)
I I no
то полученное уравнение будет иметь следующий вид:
£'' + (b* — Hi*)£' cos £ + sin £ cos £ = 0. (7.10)
Фазовый портрет уравнения (7.10) (a ■ £ — п, Q ■ £') при b* > Hi* изображен на рис. 3, при этом положения равновесия на оси абцисс расположены через п/2. При b* < Hi* фазовый портрет уравнения (7.10) совпадает с фазовым портретом, изображенным на рис. 3, уже без сдвига по оси абцисс (а ■ £, Q ■ £').
После же перехода от переменных z (о переменных z см. (4.2)) к переменным w
1 ( 1
Wi =
(—zi + b* sin £) (7.11)
\no vж )
(7.12)
1 + b*Hi
уравнение (7.10) будет эквивалентно системе
£' = —(1 + b*Hi*)wi — b* sin £ wi = sin £ cos £ + Hi*wi cos £.
Фазовый портрет системы (7.12) (а ■ £ — п, ш ■ wi) при b* > Hi* изображен на рис. 4. При b* < Hi* фазовый портрет системы (7.12) совпадает с фазовым портретом, изображенным на рис. 4, уже без сдвига по оси абцисс (а ■ £, Q ■ £').
7.3. Трансцендентный первый интеграл
Сопоставим системе (7.12) неавтономное уравнение первого порядка dwi sin £ cos £ + Hi*wi cos £
d£ — (1 + b*Hi* )wi — b* sin £
(7.13)
Используя замену т = sin g, перепишем уравнение (7.13) в алгебраическом виде
dwi т + HiФ wi
dr -(1 + b*Hu)wi - Ъ,т
(7.14)
Далее, вводя однородную переменную по формуле = ит, приводим уравнение (7.14) к следующей квадратуре:
(-Ь* - (1 + Ь.Ни)и)Жи dт (7 15)
1 + (b* + Hi*)u +(1 + b* Hi*)u2 т'
Интегрирование квадратуры (7.15) приводит к рассмотрению трех случаев. Несложный подсчет приводит к следующим первым интегралам.
I. \b* - Hi*\ < 2.
ln(1 + (b* + Hi*)u + (1 + b*Hi*)u2)+
+ , 2b* arctg 2(1 + b*Hi*)u +(b* + H* +ln т 2 = const. (7.16)
^4 - (b* - Hi*)2 у 4 - (b* - Hi*)2
II. Ъ - Hi,| > 2.
1
ln |1 + (Ъ, + Hi,)u + (1 + ^Hi,)u2| + lnт2-
1 + bHi
+ ъ,Hl
у/(Ъ, - Hi,)2 - 4
x
ln
2(1 + hHu)3/2u + (Ъ, + Hi*)V1 + ^Hi, + ^/(Ъ, - Hu)2 - 4
2(1 + b,Hi,)3/2u + (Ъ, + Hi,V1 + b,Hi, -у/ (Ъ, - Hi,)2 - 4
= const.
III. 1Ъ, - Hi, I =2.
(7.17)
ln
Ъ, + Hi,
u +
2(1 + Ъ,^,)
^ Hi* +ln |тI = const. (7.18)
2(1 + Ъ^и )u + (Ъ, + Hi,)
В переменных (g, wi) найденные первые интегралы имеют достаточно громоздкий вид. Тем не менее в случае III мы приведем его в явном виде:
( -L. Ъ, + Hi, . ) { (-Ъ, + Hi,) sin g }
wi +—--———- sin g exp < —--———----——--->= const. (7.19)
V i 2(1 + KHi,) V 12(1 + h,Hi,)wi + (Ъ, + Hi,) singj V ;
Итак, в рассматриваемом случае система динамических уравнений (7.12) имеет первый интеграл, выражающийся соотношениями (7.16)-(7.18) (или, в частности, в случае III (7.19)), являющийся трансцендентной функцией фазовых переменных (в смысле комплексного анализа) и выражающийся через конечную комбинацию элементарных функций.
Теорема 7.2. Три группы соотношений (2.1), (3.3), (4-3) при условиях (7.4), (7.8) обладают первым интегралом (полным набором), являющимся трансцендентной функцией с точки зрения комплексного анализа, выражающимся через конечную комбинацию элементарных функций.
7.4. Топологические аналогии
Предъявим далее еще две группы аналогий, связанных с системой (5.1), описывающей движение свободного твердого тела при наличии следящей силы.
Первая группа аналогий снова касается случая наличия в системе неинтегри-руемой связи (5.5). В данном случае динамическая часть уравнений движения при некоторых условиях приводится к системе (5.10).
При выполнении условий (7.4), (7.8) система (5.10) примет вид
а' = —(1 + ЬЩ)ш + b sin а, (7 20)
ш' = sin a cos а — Н1ш cos а, ^ ' '
если ввести безразмерные параметры, переменную и дифференцирование по аналогии с (7.9):
0 AB hi B
b = ano, n0 = —¡—, Hi = ——, Q = novш, < • >= nov <'> . (7.21) I I no
Теорема 7.3. Система (7.20) (для свободного тела) эквивалентна системе (7.12) (для закрепленного маятника).
Действительно, достаточно положить
£ = a, wi = ш, b* = —b, Hi* = —Hi. (7.22)
Следствие 7.1.
1. Фазовый портрет системы (7.20) при b* > H1* изображен на рис. 4. При b* < Hi* фазовый портрет системы (7.20) совпадает с фазовым портретом, изображенным на рис. 4, но со сдвигом по оси абцисс (а ■ а + п).
2. Угол атаки а для свободного тела (рис. 2) эквивалентен углу отклонения £ закрепленного маятника (рис. 1).
3. Расстояние a = CD для свободного тела соответствует длине державки l = OD закрепленного маятника.
4. Первый интеграл системы (7.20) может быть автоматически получен через равенства (7.13)-(7.15) (или (7.16)-(7.18)) после подстановок (7.22).
В переменных (а,ш) найденные первые интегралы имеют достаточно громоздкий вид. Тем не менее в случае III мы приведем его в явном виде:
( b + Hi . ) { (b — Hi) sin a } ,
ш — Tzr,-tttt sin a exp < —-——---,, . .-> = const. (7.23)
V 2(1 + bH1) J [2(1 + ЬЩ)ш — (b + H1) sin a J v '
Вторая группа аналогий касается случая движения с постоянной скоростью центра масс тела, т. е. когда выполнено свойство (5.15). В данном случае динамическая часть уравнений движения при некоторых условиях приводится к системе (5.22).
Тогда, в силу условий (5.15), (7.4), (7.8), (7.21) преобразованная динамическая часть уравнений движения (система (5.22)) примет вид аналитической системы
а' = —ш + b sin a cos0 а + Ьш0 sin а — bH^ cos0 а,
ш' = sin a cos а — Ьш sin0 a cos а + Ьш3 cos а+ (7.24)
+bH^2 sin a cos а — H^ cos а,
при этом выбирая постоянную ni следующим образом:
n1 = n0. (7.25)
Если вопрос о первом интеграле системы (7.20) решается с помощью следствия 7.1, то аналогичный вопрос для системы (7.24) решает следующая теорема 7.4.
Для этого введем следующие обозначения и новые переменные:
a = Ь _ ЪНг _ Нг A i, b + ЪЩг + Нг > о A = 1 _ b + ЪЩг _ H±
A1 2 2 2 , A2 1 + 2 + 2 + 2 > и, A3 1 2+ 2 2 , (7 26) u\ = w — sin a, «i = w + sin a, ui = vi ti, v2 = , '
тогда вопрос о явном виде искомого первого интеграла сводится к решению линейного неоднородного уравнения:
^ = ai(ti)qi + a2(ti), (7.27)
dti
где
^1) = . ^ , ^1) = ^У ^ - 1)/4)). (7.28)
^2^2 + ЬН^1 + Аз 2К и А2£2 + ЬН^1 + Аз у 7
Общее решение уравнения (7.27) имеет следующий вид:
I. \Ь - Н1\ < 2.
ql(tl) = к(Ь)(А2г21 + ЬН1£1 + Аз)х
( 2(Ь - ЬН1 - Н1) ,/ 2 + Ь + ЬН1 + Н1 ЬН1 Ц (729)
х ехр < —У аг^е < —. £1 +--, -> > . (7.29)
р\ у/ 4 - (Ь - Н1)2 е \ ^4 - (Ь - Н1)2 -у/4 - (Ь - Н1)2 // ' ;
II. \Ь - Н1\ > 2.
ql(tl) = к(£1)(А2£21 + ЬН^ + Аз)х
(Ь-ЬИ1-И1 )/^4-(Ъ-И1 )2
V4 - (b - Hi)2 + (2 + b + bHi + Hí)tí + bHi
•y/4 - (b - Hi)2 - (2 + b + bHi + Hi)ti - bHi III. |b - H1| = 2.
(7.30)
1 (ti) = *i) + 2£)2 ^ . (73i)
Для поиска решения неоднородного уравнения (7.27), (7.28) находится величина fe как функция ti, выражающаяся через конечную комбинацию элементарных функций. Ввиду громоздкости выкладок дальнейшие рассуждения приводятся лишь в случае III.
Таким образом, равенства (7.29)—(7.31) позволяют получить искомый первый интеграл системы (7.24), используя обозначения и замены (7.26). Теорема 7.4. Первый интеграл системы (7.24) является трансцендентной функцией своих фазовых переменных и выражается через конечную комбинацию элементарных функций.
Ввиду громоздкости вида полученного первого интеграла приведем его лишь в случае III:
( -2(b - Hi) sin а 1 1 - 4ш sin а + 4ш2 (7 32)
eXP\2(1 + bHiV - (b + Hi) sin а) (ш - 2 sin a/(b + Hi))2 = Ci = COnSt. (7.32)
Теорема 7.5. Первый интеграл системы (7.20) постоянен на фазовых траекториях системы (7.24).
Доказательство проведем для случая Ib - Hi| = 2. Действительно, перепишем первый интеграл (7.32) в следующем виде:
( -2n0v(b - Hi)sin а 1 n2v2 - 4n0vfisin а + 4fi2
eXP \ 2(1 + bHi)ü - n0 v(b + H) sin а) (fi - 2n0v sin ot/{b + Hi))2 = COnSt. (7.33)
Видно, что числитель второго множителя пропорционален квадрату скорости центра масс тела VC с постоянным коэффициентом. Но, в силу (5.15), данная величина постоянна на траекториях системы (7.24). Значит, на них постоянна и функция
( —2n0v(b — H^sin а 1 VC
eXP \ 2(1 + bH1)ü — n0v(b + H1) sin а J (fi — 2n0v sin a/(b + H1))2 = C°nSt (7.3 )
Возьмем далее степень ( — 1/2) от левой части равенства (7.34) и заключаем, что следующая функция также постоянна на фазовых траекториях системы (7.24):
( n0v(b — Hi) sin а 1 тт чч ,
exp^ —-ттг~\(-1)-^- \ (^ — 2novsina/(b + Hi)) = const. (7.35)
\ 2(1 + bH1)fi — n0v(b + H1) sin ajv 0/4 v 7
Теперь ясно, что функция (7.35) эквивалентна функции (7.23), поскольку в случае III выполнено следующее равенство:
(b + H1)2 =4(1 + bH1). (7.36)
Итак, мы имеем следующие топологичекие и механические аналогии в том смысле, в котором они объяснены выше.
1. Движение закрепленного на цилиндрическом шарнире физического маятника в потоке набегающей среды (неконсервативное поле сил при учете дополнительной зависимости момента сил от угловой скорости).
2. Плоскопараллельное движение свободного твердого тела в неконсервативном поле сил со следящей силой (при наличии неинтегрируемой связи и при учете дополнительной зависимости момента сил от угловой скорости).
3. Плоскопараллельное сложное движение твердого тела, вращающегося вокруг центра масс, движущегося прямолинейно и равномерно и находящегося в неконсервативном поле сил при учете дополнительной зависимости момента сил от угловой скорости.
Литература
[1] Shamolin M.V. New integrable cases and families of portraits in the plane and spatial dynamics of a rigid body interacting with a medium // Journal of Mathematical Sciences. 2003. Vol. 114. № 1. P. 919-975.
[2] Шамолин М.В. Многообразие случаев интегрируемости в динамике маломерного и многомерного твердого тела в неконсервативном поле // Итоги науки и техники. Сер.: Современная математика и ее приложения. Тематические обзоры. 2013. T. 125. C. 5-254.
[3] Shamolin M.V. New cases of integrability in dynamics of a rigid body with the cone form of its shape interacting with a medium // PAMM (Proc. Appl. Math. Mech.). 2009. № 9. P. 139-140.
[4] Шамолин М.В. Многообразие типов фазовых портретов в динамике твердого тела, взаимодействующего с сопротивляющейся средой // Доклады РАН, 1996. Т. 349. № 2. С. 193-197.
[5] Шамолин М.В. Новое двупараметрическое семейство фазовых портретов в задаче о движении тела в среде // Доклады РАН. 1994. Т. 337. № 5. С. 611-614.
[6] Шамолин М.В. Динамические системы с переменной диссипацией: подходы, методы, приложения // Фунд. и прикл. мат. 2008. Т. 14. Вып. 3. С. 3-237.
[7] Арнольд В.И., Козлов В.В., Нейштадт А.И. Математические аспекты классической и небесной механики. М.: ВИНИТИ, 1985. 304 с.
[8] Трофимов В.В. Симплектические структуры на группах автоморфизмов симметрических пространств // Вестн. Моск. ун-та. Сер.: 1. Математика. Механика. 1984. №6. C. 31-33.
[9] Трофимов В.В., Шамолин М.В. Геометрические и динамические инварианты интегрируемых гамильтоновых и диссипативных систем // Фунд. и прикл. мат. 2010. Т. 16. Вып. 4. С. 3-229.
[10] Шамолин М.В. Методы анализа динамических систем с переменной диссипацией в динамике твердого тела. М.: Экзамен, 2007. 352 с.
[11] Shamolin M.V. Classes of variable dissipation systems with nonzero mean in the dynamics of a rigid body // Journal of Mathematical Sciences. 2004. Vol. 122. № 1. P. 2841-2915.
[12] Шамолин М.В. Некоторые модельные задачи динамики твердого тела при взаимодействии его со средой // Прикл. механика. 2007. Т. 43. №10. С. 49-67.
[13] Шамолин М.В. Новые интегрируемые случаи в динамике тела, взаимодействующего со средой, при учете зависимости момента силы сопротивления от угловой скорости // Прикл. мат. и мех. 2008. Т. 72. Вып. 2. С. 273-287.
[14] Шамолин М.В. Об интегрируемости в элементарных функциях некоторых классов динамических систем // Вестн. Моск. ун-та. Сер.: 1. Математика. Механика. 2008. № 3. С. 43-49.
[15] Шамолин М.В. Об устойчивости прямолинейного поступательного движения // Прикл. механика. 2009. Т. 45. №6. С. 125-140.
References
[1] Shamolin M.V. New integrable cases and families of portraits in the plane and spatial dynamics of a rigid body interacting with a medium. Journal of Mathematical Sciences, 2003, Vol. 114, no. 1, pp. 919-975 [in English].
[2] Shamolin M.V. Variety of cases of integrability in dynamics of lower-, and multidimensional body in nonconservative field Itogi nauki i tekhniki. Ser.: Sovremennaia matematika i ee prilozheniia. Tematicheskie obzory [Results of science and technique. Series: Contemporary Mathematics and Its Applications. Subject reviews], Vol. 125 "Dynamical Systems", 2013, pp. 5-254 [in Russian].
[3] Shamolin M.V. New cases of integrability in dynamics of a rigid body with the cone form of its shape interacting with a medium. In: PAMM (Proc. Appl. Math. Mech.), 9, 139-140 (2009) [in English].
[4] Shamolin M.V. Variety of types of phase portraits in dynamics of a rigid body interacting with a resisting medium. Doklady RAN [Proceedings of the Russian Academy of Sciences], 1996, Vol. 349, no. 2, pp. 193-197 [in Russian].
[5] Shamolin M.V. A new two-parameter family of phase portraits in problem of a body motion in a medium. Doklady RAN [Proceedings of the Russian Academy of Sciences], 1996, Vol. 337, no. 5, pp. 611-614 [in Russian].
[6] Shamolin M.V. Dynamical Systems With Variable Dissipation: Approaches, Methods, and Applications. Fund. i prikl. mat. [Fundamental and Apllied Mathematics], 2008, Vol. 14, no. 3, pp. 3-237 [in Russian].
[7] Arnold V.I., Kozlov V.V., Neyshtadt A.I. Mathematical aspect in classical and celestial mechanics, M., VINITI, 1985, 304 p. [in Russian].
112
М.В. LUaMOAUH
[8] Trofimov V.V. Symplectic structures on symmetruc spaces automorphysm groups. Vestnik Mosk. Un-ta. Ser. 1. Matematika. Mekhanika [Vestnik of Moscow University. Series 1. Mathematics. Mechanics], 1984, no. 6, pp. 31-33 [in Russian].
[9] Trofimov V.V., Shamolin M.V. Geometrical and dynamical invariants of integrable Hamiltonian and dissipative systems. Fund. i prikl. mat. [Fundamental and Apllied Mathematics], 2010, Vol. 16, no. 4, pp 3-229 [in Russian].
[10] Shamolin M.V. Methods of analysis of various dissipation dynamical systems in dynamics of a rigid body. M., Izd-vo "Ekzamen", 2007, 352 p. [in Russian].
[11] Shamolin M.V. Classes of variable dissipation systems with nonzero mean in the dynamics of a rigid body. Journal of Mathematical Sciences, 2004, Vol. 122, no. 1, pp. 2841-2915 [in English].
[12] Shamolin M.V. Some model problems of dynamics for a rigid body interacting with a medium. Prikl. Mekhanika [Applied Mechanics], 2007, Vol. 43, no. 10, pp. 49-67 [in Russian].
[13] Shamolin M.V. New integrable cases in dynamics of a medium-interacting body with allowance for dependence of resistance force moment on angular velocity. Prikl. mat. i mekh. [Applied Mathematics and Mechanics], 2008, Vol. 72, no. 2, pp. 273-287 [in Russian].
[14] Shamolin M.V. Integrability of some classes of dynamic systems in terms of elementary functions, Vestnik Mosk. Un-ta. Ser. 1. Matematika. Mekhanika [Vestnik of Moscow University. Series 1. Mathematics. Mechanics], 2008, no. 3, pp. 43-49 [in Russian].
[15] Shamolin M.V. Stability of a rigid body translating in a resisting medium. Prikl. Mekhanika [Applied Mechanics], 2009, Vol. 45, no. 6, pp. 125-140 [in Russian].
M.V. Shamolin3
CASES OF INTEGRABILITY CORRESPONDING TO THE PENDULUM MOTION ON THE PLANE
In this article, we systemize the results on the study of plane-parallel motion equations of fixed rigid body-pendulum which is placed in certain nonconserva-tive force field. In parallel, we consider the problem of a plane-parallel motion of a free rigid body which is also placed in a similar force field. Thus, the non-conservative tracking force operates onto this body. That force forces the value of certain point of a body to be constant for all the time of a motion, which means the existence of nonintegrable servoconstraint in the system. The obtained results are systematized and served in the invariant form. We also show the nontrivial topological and mechanical analogies.
Key words: rigid body, resisting medium, dynamical system, phase pattern, case of integrability.
Статья поступила в редакцию 18/IX/2015. The article received 18/IX/2015.
3Shamolin Maxim Vladimirovich (shamolin@rambler.ru, shamolin@imec.msu.ru), Institute of Mechanics, Lomonosov Moscow State University, 1, Leninskie Gory, Moscow, 119192, Russian Federation.
