


 CC BY
CC BY 78
78
2015
НАУЧНЫЙ ВЕСТНИК МГТУ ГА
№ 220
УДК 517.977.58
РЕШЕНИЕ ЗАДАЧИ О СТАБИЛИЗАЦИИ СПУТНИКА С ПОМОЩЬЮ БИОИНСПИРИРОВАННЫХ МЕТОДОВ ОПТИМИЗАЦИИ
A.B. ПАНТЕЛЕЕВ, Н.М. ОРЛОВСКАЯ
В работе исследуется применение биоинспирированных методов глобальной условной оптимизации в задаче поиска оптимального управления пучками траекторий нелинейных детерминированных систем. Рассмотрено применение четырех биоинспирированных методов, имитирующих поведение лягушек, кукушек, светлячков, а также распространение сорняков. Приведено решение прикладной задачи о стабилизации спутника. Эффективность предложенных алгоритмов исследована с помощью созданного комплекса программ.
Ключевые слова: оптимальное управление, глобальный экстремум, пучки траекторий, нелинейные детерминированные системы, биоинспирированные методы, стабилизация спутника.
ВВЕДЕНИЕ
Биоинспирированные методы глобальной оптимизации - группа метаэвристических методов, имитирующих процессы в природной среде и поведение некоторых видов животных и растений [1]. К ним относятся методы, имитирующие поведение лягушек, кукушек, светлячков, летучих мышей, стай рыб, распространение сорняков и др. Все эти методы объединяют принципы, характерные для элементов живой природы в их среде обитания.
Метод, имитирующий поведение кукушек (Cuckoo Search) [2], и метод, имитирующий распространение сорняков (Weed Colonization) [3], относятся также и к эволюционным методам. В их основе лежит идея процесса эволюционного поиска, то есть формирования новой популяции, когда в результате применения некоторых операций из этой популяции удаляются особи (возможные решения) с наихудшей приспособленностью и заменяются особями с лучшей приспособленностью. Степень приспособленности определяется значением целевой функции, которая используется для поиска наилучшего решения. Метод, имитирующий поведение кукушек, использует особенности их размножения. Отложенное в чужое гнездо яйцо исследуется хозяйкой с заданной вероятностью. Для реализации этого процесса часть гнезд (возможных решений) удаляется и заменяется новыми гнездами, генерируемыми с помощью распределения Леви. В основе метода, имитирующего распространение сорняков, лежит модель рассеивания семян вокруг каждого растения в популяции. Из семян вырастают растения и образуют новую популяцию, из которой удаляются растения с наихудшей приспособленностью (наихудшим значением целевой функции).
Методы, имитирующие поведение лягушек (Shuffled Frog-Leaping Algorithm) [4] и светлячков (Glowworm Swarm Optimization) [5], относятся к методам «роевого» интеллекта. Основная идея этих методов - взаимодействие множества агентов системы «роевого» интеллекта между собой, в процессе которого они обмениваются информацией с целью приближения к оптимальному решению. Метод, имитирующий поведение лягушек, моделирует поведение стаи особей при поиске пищи. Внутри каждой стаи производится одно и то же количество итераций локального поиска. Локальный поиск аналогичен применяемому в методе частиц в стае (члены стаи сообщают друг другу информацию о наилучших позициях в стае или в популяции в целом) [1]. На основании локального поиска лягушка в стае улучшает свое положение, чтобы получить больше пищи (достигнуть наилучшего решения). Таким образом, на каждой итерации особь с наихудшим значением целевой функции будет двигаться к лучшему решению на основе полученной информации. В методе, имитирующем поведение светлячков, используется принцип, при котором особи популяции получают информацию о цели (величине целевой функции) путем органов чувств. В данном случае, свет, который
порождают светлячки, помогает пм притягивать пищу и партнеров. Величина целевой функции отождествляется с яркостью, информацию о которой светлячок передает в своей окрестности с помощью специального вещества. Каждый светлячок выбирает наиболее яркого соседа и случайным образом двигается в его направлении.
В данной статье описанные методы и созданное на их основе программное обеспечение [6] применяются для численного решения задачи оптимального управления пучком траекторий нелинейных детерминированных систем [7]. Искомое управление ищется в классе функций с насыщением, учитывающим наличие ограничений на управление, с использованием систем базисных функций, применяемых в спектральном методе анализа и синтеза нелинейных систем [8]. Эффективность предложенного подхода демонстрируется на задаче оптимальной стабилизации спутника [9].
1. ПОСТАНОВКА ЗАДАЧИ
Поведение модели объекта управления описывается дифференциальным уравнением х = /(V, х(V),и(V)), где V - непрерывное время, tе Т = [^,], начальный и конечный
моменты времени заданы; х - вектор состояния системы, х е Я"; и - вектор управления, и = (их,.., ид )Т еи (V) с Я; и (V) - множество допустимых значений управления, для каждого значения V представляющее собой прямое произведение отрезков [ai(V),bi(V)], i = 1,2,...,q;
f х,и) = (( х,и),...,^ х,и)) - непрерывно дифференцируемая вектор-функция.
Возможные начальные состояния заданы компактным множеством О положительной меры с кусочно-гладкой границей: х(^) = х0 еОс Я".
Множество О характеризует неопределенность задания начальных условий. Правый конец траектории х(^) свободен. Предполагается, что при управлении используется информация о непрерывном времени V и о части координат вектора состояния системы (предполагается, что это первые т координат). Таким образом, о компонентах вектора х1 е Ят известна текущая информация, а о компонентах вектора х2 е Я"-т она отсутствует, при этом х = (х1, х2) е Я", 0 < т < ". Если т = 0, информация о векторе состояния отсутствует, а если т = " , то имеется полная информация о векторе состояния.
Управление, применяемое в каждый момент времени V, имеет вид управления с неполной обратной связью: и(V) = и(V, х1^)). Если т = 0, система управления будет разомкнутой по состоянию, а управление программным, а если т = " , то - системой с полной обратной связью.
Множество допустимых управлений ит образуют такие функции и (V, х1), что Vt е Т
управление и (V) = и (V, хV)) е и (V) кусочно-непрерывно, а функция f (V, х, и (V, х1)) такова, что решение дифференциального уравнения существует и единственно.
Множество допустимых процессов х0) - это множество пар d = (х(V), и(V)),
включающих траекторию х^) и кусочно-непрерывное допустимое управление и(V), где и(V) е и(V) , удовлетворяющих дифференциальному уравнению и начальному условию.
На множестве допустимых процессов D(t0, х0) определен функционал качества управления
I (х0, d) = | f, х^), и (V М
+ ^ )), где f , х,и) и ^(х) - заданные непрерывные функции.
Каждому допустимому управлению и^, х1) е ит и множеству О поставим в соответствие пучок (ансамбль) траекторий исходного уравнения:
X (t ; u (t, х1)) = и {x(t; u (t, x1 (t )), x(t0))| x(t0) eQ }, t e T = [ t0, ],
т.е. объединение решений исходного уравнения по всем возможным начальным состояниям. Пучок траекторий порождается множеством Q и управлением u(t, x1) e Um .
Качество управления пучком траекторий предлагается оценивать величиной JI ( Хо, d ) dxo
функционала j[u(t, x!)] -, где mes Q - мера множества Q .
mes Q
Требуется найти такое управление u (t, x ) e Um,
u (t,x1)e Um
2. СТРАТЕГИЯ ПОИСКА РЕШЕНИЯ
Будем предполагать, что:
а) множество начальных состояний Q представляет собой параллелепипед, определенный прямым произведением отрезков [аг., в ], i = 1,..., n, т.е. Q = [a1, pj x... x [an, pn ].
Все отрезки [аг.,в], i = 1,...,n с помощью шага Лхг. разбиваются на Ni отрезков, а
параллелепипед Q делится на N = N1 • • • Nn элементарных непересекающихся подмножеств
Q j, j = 1,..., N. В каждом элементарном подмножестве Q j задается начальное состояние x0
(центр Qj );
б) оценка множества возможных состояний представляется прямым произведением [Xj, xj x — x[xn, xn ], где x., xt - нижняя и верхняя граница по каждой координате
соответственно;
в) компоненты закона управления u(t, x1) = ((t, x1),...,uq(t, x1)) ищутся в виде
ul (t, x1) = sat <
L0 -1 Ll-\ Lm -1
EX" Ê ■ q (.0 , t) (.1, x1 ) • ■ ■ Pm (m , xm )
.0 =0.1 =0 im=0
u (t, x1 )
, l = q,
где Vt e T = [t0, tN ] : sat{u (t, x1(t))} =
и (Г, х'(Г), если а, (Г) < и/ (Г, х'(Г)) < Ъ (Г), а, (г), если и (г, х1 (г)) < а{ (г), Ъ (г), если и (г, х1 (г)) > Ъ (г); и1^. - неизвестные коэффициенты; £0,Ь1,...,Ьт - масштабы усечения по времени и координатам вектора состояния, используемым в управлении.
В качестве функций q(0,г) , р1 х1),...,рт (т,хт) могут использоваться [8]:
а) полиномы Лежандра (г0 = 0, 1 < т < п ):
q^t ) = .
2L +1
¡0 tk
Zl — . = 0 1 L -1 l = (-1)"kr!0 Гг0-k •
¿0k Л ' 0 1' lî0k V V .0 +k ¿0 '
0
N k=0 «N
Рт ((т ,хт)
2im +1
( - У
Vх т хт )
^т^ V1 7 У т : = 01 Т - 17 =(- 1)т -кСт С - - \к> т - Ч^-'-^т Чтк У V <
хт - хтк=0 (т - Х т )
б) нестационарные косинусоиды (t0 = 0, 1 < т < " ):
q(io, t) =
-1, io = 0,
N
1
2 /ПП
— СОБ-
Рт (im , Хт ) = <
^ tN
, io 1,2,..., Т0 1;
=-, ^ = 0,
2 i п(х - х )
^ IV ' . л г\ Т Л
=-СОБ—=-=-, / = 1,2,...,Тт -1.
' т ' ' ' т
Стратегия решения заключается в переходе к задаче поиска максимума функционала с помощью подбора коэффициентов и^ i , входящих в функцию разложения. Для формализации
задачи предлагается использовать векторы и = (и1о^ , ,...,и^ т ) , которые представляют собой гиперстолбцовые матрицы, состоящие из q компонент - векторов и' i i = и(т +1,0) :
IV "00...0 и(Т0-1)0...0 и(Т-1)( Т1-1)...0
и и 00...1 и(Т0-1)0...1 и(Т0-1)( Т1-1)...1
и0 0...(Тт -1) и(10-1)0...(Тт-1) _ и(Т0-1)(А-1)...(Тт-1) _
I = 1,
Для решения задачи поиска наилучшего вектора и = (и^ i ,...,и^ i ) и, как следствие,
управления и(^ х1) = (uо(t,х1),...,ич(V,х1)) , применяется один из биоинспирированных методов поиска глобального условного экстремума функций многих переменных [6]. В процессе его применения на каждой итерации формируется Р новых векторов и = (и^ 1 ,...,и^ т ) , где Р -
размер популяции: (иР 1 ,...,р^ ^ ) , Р = 1,...,Р. Для каждого из векторов требуется найти
значение критерия. Для этого необходимо:
а) на каждом элементарном подмножестве О. задать начальное состояние х0;
б) по вектору (и(,...,^т ) найти управление u(t, х1) = (uо(t,x1),...,^(t,х1)) ;
в) найти решение х} (V) уравнения модели с управлением и (, х1) и начальным условием х0;
г) вычислить значение функционала: I (, d}), где d} = (х} (V), и} (V) = и (V, х11 (V))), 1 = 1,...,N .
д) после нахождения величины функционала для всех начальных состояний из
N
ЕI (, d])
элементарных подмножеств О . вычисляется значение критерия J[и(V, х1)] = —-.
1 N
и
В качестве решения задачи выбирается наилучший вектор и = (^ т ,...,и?^ т ) и соответствующее ему управление.
3. РЕШЕНИЕ ЗАДАЧИ О СТАБИЛИЗАЦИИ СПУТНИКА
Рассматривается задача гашения вращательного движения спутника с помощью установленных на нем двигателей [9]. Движение твердого тела относительно центра инерции описывается системой дифференциальных уравнений:
р + (Х-д)?г = а1и1, д? + (1 - X) гр = а2и2, Хг + (д -1) р? = а3и3,
где р, ?, г - проекции угловой скорости на главные центральные оси инерции. В правых частях системы стоят моменты сил относительно этих осей. Предполагается, что моменты создаются тремя двигателями, закреплёнными на теле. Двигатели создают тяги и1, и2, и3;
плечи приложения сил а1, а2, а3.
В начальный момент тело вращается: = 0, р = р0, ? = ?0, г = г0 . Требуется так управлять двигателями, чтобы за фиксированное время погасить угловые скорости тела: ^ = , р = 0, ? = 0, г = 0.
При этом необходимо минимизировать функционал:
N
I = |(| и1(Г) | +1 иг($) | +1 щ(Г) |)Ж.
Значения параметров и начальных данных:
Х = д = —; а1 = а3
1
6
а,,
; =1 р 0=24, ?0 = г0 =16
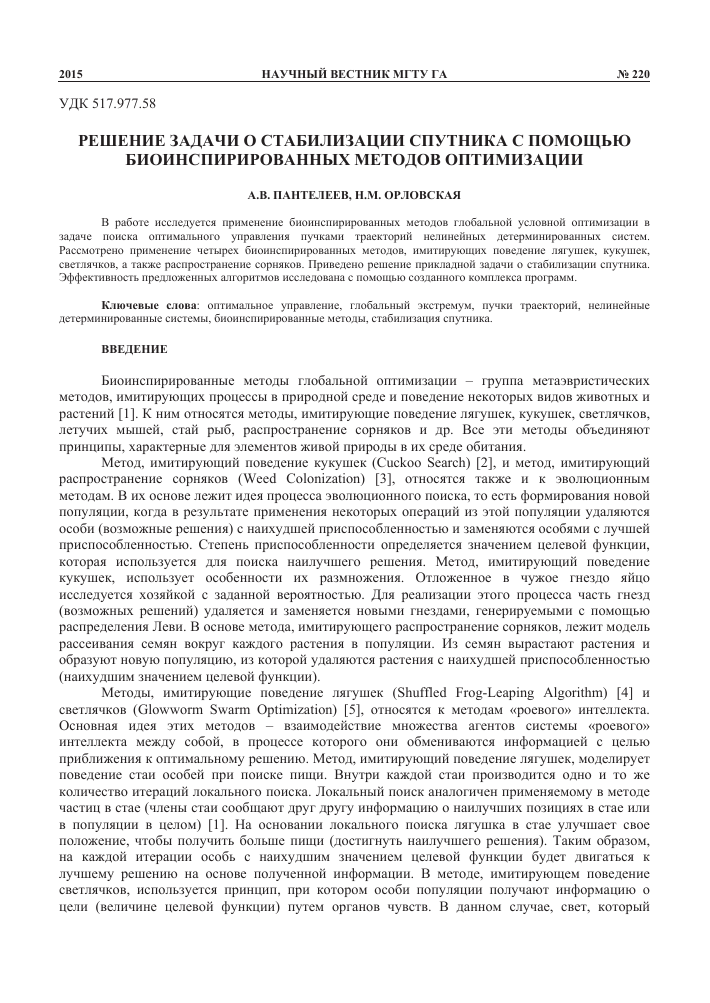
На рис. 1 представлены оптимальные управления и проекции угловой скорости, полученные И.А. Крыловым [9]. Минимальное значение функционала, найденное в результате численного решения задачи: I = 169,42, а в результате теоретического: I = 166,56.
V
\flii 05 475 ^70 1 г
Рис. 1. Решение задачи, полученное И. А. Крыловым [11]
Для учета конечных условий на угловые скорости при t = tN к функционалу I предлагается добавить терминальный член, отражающий штраф за их невыполнение:
tN
I = J(| ux(t)| + | u2(t) | + | u3(t) |)dt + R1p2(tN) + R2q2(tN) + R3r2(tN), где ^^R3- положительные
0
параметры штрафа. Для численного решения дифференциальных уравнений используется метод Рунге-Кутты 4-го порядка.
Параметры метода, имитирующего поведение лягушек: P = 200, ITER = 1200 (при минимизации J[u(t)] ITER = 500), IT = 20 (при минимизации J[u(t)] IT = 10), ST = 20, C = 1,6. Масштабы усечения вектора управления при минимизации J[u(t)] L0 = 6, J[u(t, Xj)] L0 = 4, L1 = 1, J[u(t, X2)] L0 = 4, L2 = 2, J[u(t, x3)] L0 = 4, L3 = 2, J[u(t,x17x2)] L0 = 4, L1 = 1, L2 = 2, J[u(t, x1, x3)] L0 = 4, L1 = 1, L3 = 2, J[u(t, x2, x3)] L0 = 4, L2 = 2, L3 = 2, J[u(t, x1, x2, x3)] L0 = 4, L1 = 1, L2 = 2, L3 = 2. Параметры штрафа R1 = 100, R2 = R3 = 10.
Параметры метода, имитирующего распространение сорняков: P = 100, ITER = 500 (при минимизации J[u(t,x13x2)], J[u(t,x1,x3)], J[u(t,x2,x3)], J[u(t,x1,x2,x3)] ITER = 800), оinitial = 15
, оfinai = 0,1, r = 3, PMAX = 120, smm = 0, ^max = 5 . Масштабы усечения вектора управления при минимизации J[u(t)] L0 = 4, J[u(t,x^] L0 = 4,L1 = 2, J[u(t,x2)] L0 = 4,L2 = 2,J[u(t,x3)] L0 = 4,L3 = 2 J[u(t, x1, x2)] L0 = 4, L1 = 2, L2 = 1, J[u(t, x1, x3)] L0 = 4, L1 = 2, L3 = 2, J[u(t, x2, x3)] L0 = 4, L2 = 2, L3 = 2, J[u(t, x1, x2, x3)] L0 = 4, L1 = 2, L2 = 2, L3 = 1. Параметры штрафа R1 = 100, R2 = R3 = 10 .
Параметры метода, имитирующего поведение кукушек: P = 160, ITER = 1200 (при минимизации J[u(t)] ITER = 600), а = 15, Х = 2,5, pd = 0,4. Масштабы усечения вектора
управления при минимизации J[u(t)] L0 = 2, J[u(t, x1)] L0 = 2, L1 = 2, J[u(t, x2)] L0 = 2, L2 = 1, J[u(t,x3)] L0 = 2,L3 = 2, J[u(t,x1,x2)] L0 = 2, L1 = 2, L2 = 1, J[u(t,x1,x3)] L0 = 2, L1 = 2, L3 = 1, J[u(t, x2, x3)] L0 = 2, L2 = 1, L3 = 2, J[u(t, x1, x2, x3)] L0 = 2, L1 = 2, L2 = 1, L3 = 1. Параметры штрафа R1 = 50, R2 = 5, R3 = 10 .
Параметры метода, имитирующего поведение светлячков: P = 100, ITER = 800 (при минимизации J[u(t,x2)] ITER = 400), a = 5, 7 = 0,1 S = 5. Масштабы усечения вектора управления при минимизации J[u(t)] L0 = 2, J[u(t, x1)] L0 = 2, L1 = 2, J[u(t, x2)] L0 = 2, L2 = 2, J[u(t, x3)] L0 = 2,L3 = 2 J[u(t,x1,x2)] L0 = 2, L1 = 2, L2 = 1, J[u(t, x1, x3)] L0 = 2, L1 = 1, L3 = 2, J[u(t, x2, x3)] L0 = 2, L2 = 1, L3 = 2, J[u(t, x1, x2, x3)] L0 = 2, L1 = 2, L2 = 1, L3 = 1. Параметры штрафа R1 = 100, R2 = R3 = 10 .
В таблице приведены результаты решения задачи, полученные каждым из методов.
Таблица. Результаты работы методов при Q = [23,95;24,05] х [15,95;16,05] х [15,95;16,05]
Метод, имитирующий поведение лягушек Метод, имитирующий распространение сорняков Метод, имитирующий поведение кукушек Метод, имитирующий поведение светлячков
J [u(t)] 169,442504 170,143736 169,850069 171,477261
J [u(t, x1)] 170,023975 168,690796 168,997028 170,680227
J [uu(t, x2)] 170,683015 168,883883 168,051548 171,029972
Продолжение таблицы
J[u (t, Х3)] 170,772179 169,594432 168,086490 170,022880
J [u (t, x15 x2)] 169,885130 168,536253 167,991313 170,801598
J [u (t, x¿, X3)] 170,436109 167,843290 169,707815 169,920019
J [u (t, x2, x3)] 169,766584 168,710954 167,986762 170,290912
J[u(t, Xj, x2, x3)] 169,251749 167,294550 168,982669 169,247502
На рис. 2 приведены графики оптимального в среднем программного управления и сечений пучка траекторий, полученные с помощью метода, имитирующего распространение сорняков. Параметры: 10 = 4, N = 8 0 = [23,5;24,5] х [15,5;16,5] х [15,5;16,5].
ЗАКЛЮЧЕНИЕ
В работе рассмотрено применение биоинспирированных методов, основанных на имитации процессов в природной среде и поведении некоторых видов животных и растений. На основе предложенных алгоритмов создано программное обеспечение для решения задач поиска оптимального в среднем управления пучками траекторий нелинейных детерминированных систем. Эффективность алгоритмов продемонстрирована на примере задачи о стабилизации спутника. Сравнение с результатами, полученными с помощью других методов поиска оптимального управления, показало эффективность биоинспирированных методов, позволяющих находить решение, близкое к оптимальному.
ЛИТЕРАТУРА
1. Пантелеев А.В., Метлицкая Д.В., Алешина Е.А. Методы глобальной оптимизации. Метаэвристические стратегии и алгоритмы. - М.: Вузовская книга, 2013.
2. Yang X.-S., Deb S. Engineering Optimization by Cuckoo Search // Int. J. Mathematical Modelling and Numerical Optimization, V. 1. № 4. 2010. P. 330-340.
3. Mehrabian A.R., Lucas C.A. novel numerical optimization algorithm inspired from weed colonization // Ecological Informatics, V.1. № 4. 2006. P. 355-366.
4. Eusuff M.M., Lansey K.E. Optimization of water distribution network design using the shuffled frog leaping algorithm // Journal of Water Resources Planning and Management. 2003. № 3. P. 210-225.
5. Yang X.-S. Firefly algorithms for multimodal optimization // Stochastic Algorithms: Foundations and Applications, SAGA 2009, Lecture Notes in Computer Sciences. 2009. V. 5792. P. 169-178.
6. Орловская H.M. Анализ эффективности биоинспирированных методов глобальной оптимизации [Электронный ресурс] // «Труды МАИ». 2014. Вып. 73.
7. Методы описания, анализа и синтеза нелинейных систем управления / В.В. Семенов, А.В. Пантелеев, Е.А. Руденко, А.С. Бортаковский. - М.: Изд-во МАИ, 1993.
8. Пантелеев А.В., Рыбаков К.А. Прикладной вероятностный анализ нелинейных систем управления спектральным методом. - М.: Изд-во МАИ-ПРИНТ, 2010.
9. Пантелеев А.В., Письменная В.А. Применение меметического алгоритма в задаче поиска оптимального программного управления нелинейными непрерывными детерминированными системами// Авиакосмическое приборостроение. 2014. № 3. С. 26-34.
SOLUTION OF THE STABILIZATION OF SATELLITE PROBLEM WITH BIOINSPIRED OPTIMIZATION METHODS
Panteleyev A.V., Orlovskaya N.M.
This paper presents bioinspired global optimization methods to solve the problem of finding the optimal program control of bundle of trajectories of nonlinear deterministic systems. It considers four bioinspired global optimization methods: Shuffled Frog Leaping Algorithm, Weed Colonization, Glowworm Swarm Optimization and Cuckoo search. The effectiveness of the proposed algorithms is researched with the software complex, formed in C#. The solution of stabilization of satellite problem is presented.
Keywords: optimal control, global extremes, bundle of trajectories, nonlinear deterministic systems, bioinspired methods, stabilization of satellite.
REFERENCES
1. Panteleev A.V., Metlickaja D.V., Aleshina E.A. Metody global'noj optimizacii. Metajevristicheskie strategii i algoritmy (Global optimization methods. Metaheuristic strategies and algorithms), Moscow, Vuzovskaja kniga, 2013, 244 p.
2. Yang X.-S., Deb S. Engineering Optimization by Cuckoo Search, Int. J. Mathematical Modelling and Numerical Optimization, 2010, vol. 1, no. 4, pp. 330-340.
3. Mehrabian A.R., Lucas C.A. Novel numerical optimization algorithm inspired from weed colonization, Ecological Informatics, 2006, vol. 1, no.4, pp. 355-366.
4. Eusuff M.M., Lansey K.E. Optimization of water distribution network design using the shuffled frog leaping algorithm, J. of Water Resources Planning and Management, 2003, no. 3, pp. 210-225.
5. Yang X.-S. Firefly algorithms for multimodal optimization, Stochastic Algorithms: Foundations and Applications, SAGA 2009, Lecture Notes in Computer Sciences, 2009, vol. 5792, pp. 169-178.
6. Orlovskaja N.M. Elektronnyi zhurnal «Trudy MAI», 2014, no. 73, available at: www.mai.ru/science/trudy/
7. Semenov V.V., Panteleev A.V., Rudenko E.A., Bortakovskij A.S. Metody opisanija, analiza i sinteza nelinejnyh sistem upravlenija (Description, Analysis, and Synthesis of Nonlinear Control Systems), MAI Publishers, 1993, 312 p.
8. Panteleev A.V., Rybakov K.A. Prikladnoj verojatnostnyj analiz nelinejnyh sistem upravlenija spektral'nym metodom (Applied probabilistic analysis of nonlinear control systems by the spectral method), Moscow, MAI Publishers, 2010, 160 p.
9. Panteleev A.V., Pis'mennaja V.A. Aviakosmicheskoepriborostroenie, 2014, no. 3, pp. 26-34.
Сведения об авторах
Пантелеев Андрей Владимирович, 1955 г.р., окончил МГТУ им. Н.Э. Баумана (1978), доктор физико-математических наук, профессор, заведующий кафедрой математической кибернетики факультета "Прикладная математика и физика" Московского авиационного института (Национального исследовательского университета), автор более 150 научных работ, область научных интересов - методы синтеза оптимальных нелинейных систем управления, методы оптимизации.
Орловская Наталья Михайловна, студентка факультета «Прикладная математика и физика» Московского авиационного института, область научных интересов - методы оптимизации, метаэвристические методы.
